
什么是maya三维点云数据,探索其独特魅力
4011
2023-11-20

什么是激光点云技术?
激光点云技术是一种通过激光雷达扫描地面或物体,生成包含大量三维坐标点的数据集的技术。该技术可以高效地获取多个角度和视角下目标对象的准确空间位置信息,适用于建筑测量、机器人导航、虚拟现实等领域。
1.什么是激光点云技术
激光点云技术是一种通过使用激光雷达扫描物体表面,并将反射回来的激光束转换为三维坐标点形成数据集的技术。通过这种方式,可以获得高精度、密集的三维模型数据,并且不受环境光影响。
2.激光点云技术原理
激光点云技术利用激光器发射出非常短的激光脉冲,然后经过镜头聚焦成极小的光斑进行定向辐射,从而在被观察物体表面产生强反射。接收器捕捉反射回来的激光束,测量该激光束的飞行时间,然后根据光速计算出它所反射的位置,并将此信息转化为三维坐标点。
3.激光点云技术应用
激光点云技术可以应用于建筑测量、机器人导航、虚拟现实等领域。在建筑测量中,激光扫描仪可以用于建筑外部及内部的地形勘测、结构分析、空间检测和物体录入等工作。在机器人导航方面,激光雷达可以帮助机器人正确感知周围环境,并制定正确的路径规划。在虚拟现实中,利用激光点云技术可以生成高精度的虚拟场景,使得用户可以更真实地体验虚拟环境。
激光雷达地面点云分割方法浅析
激光雷达扫描得到的点云含有大部分地面点,这对后续障碍物点云的分类、识别和跟踪带来麻烦,所以需要首先滤波滤掉。
传统的基于几何特征的滤波是最基本最简单的方法,本文尝试的有如下几种:
1、水平面校准
2、法向量
3、栅格高度差
4、栅格最低高度以上0.2米
5、绝对高度
6、平均高度
以上方法基于假设是地面点云所构成的地面为平面,而不是弧面,当然对于有倾斜角度的地面也是可以先通过水平面校准然后再进行后处理来达到目标。下面将针对以上几种方法,通过实验结果比对各自方法优劣。
1. 激光雷达地面点云分割方法
1.1 水平面校准
水平面校准顾名思义就是通过找到地面点所在平面,然后进行校准点云的方法。通过此步可将数据采集阶段,采集道德地面点云相对于激光雷达 z 轴不平行校准为与之平行。目的是为后续处理提供更易于处理的点云。
方法过程:
分割出大致地面点
找到地点所在平面
通过变换矩阵校准平面
1. 分割出大致地面点
这一步可使用栅格高度差、绝对高度、法向量等方法来进行分割,目的只需要找到大部分地面点即可,不用进行精确的分割。本文通过法向量进行分割找到地面点。
2. 找到地点所在平面
通过PCL自带函数进行处理。
通过上述代码找到平面之后,确定平面法向量就可以找到其到 z 轴的变换矩阵 T 。
3. 通过变换矩阵校准平面
将原始点云与变换矩阵 T 作点积就可得到校准后点云。
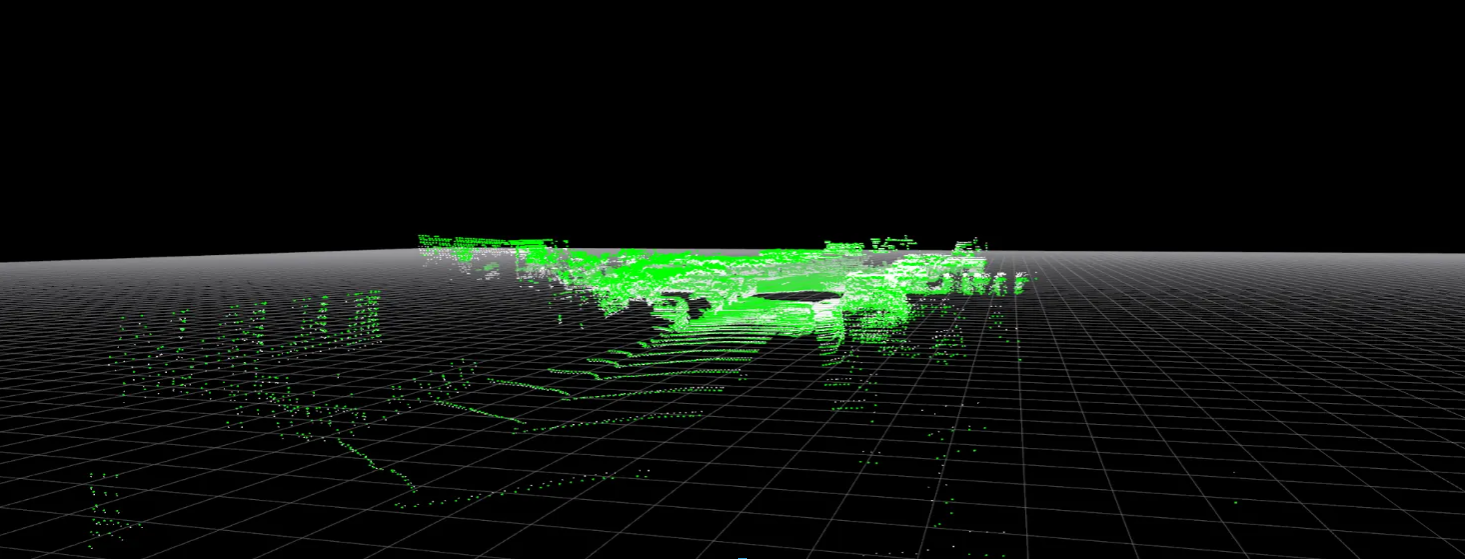
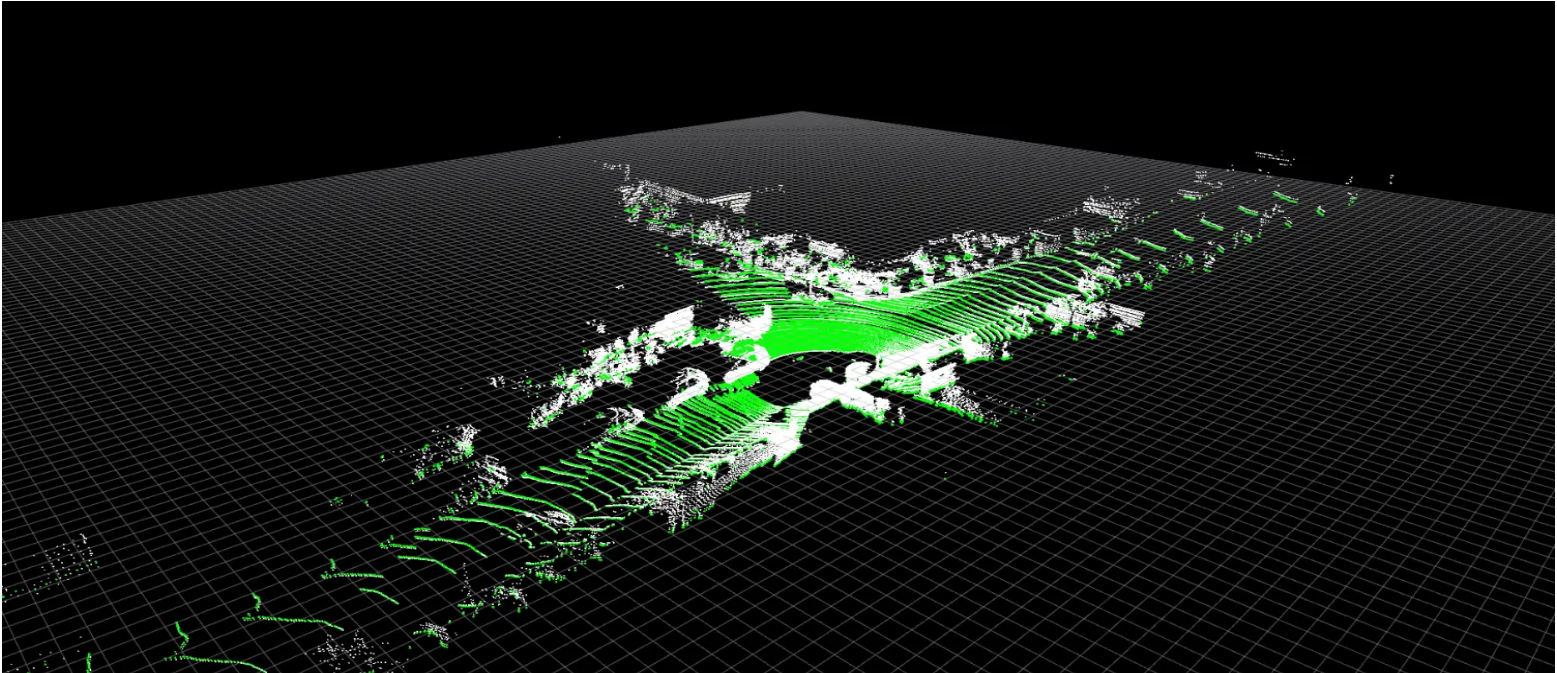
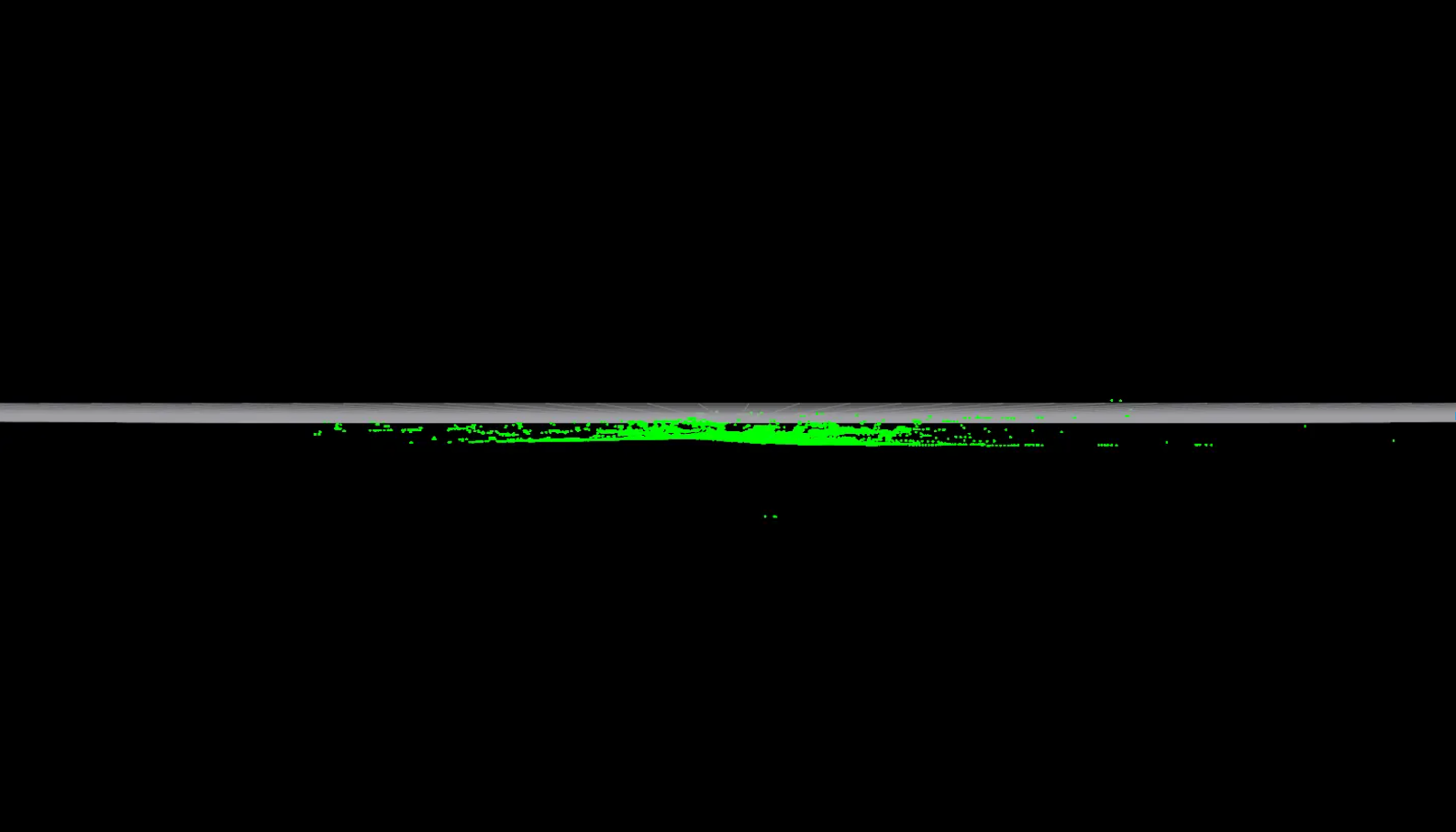
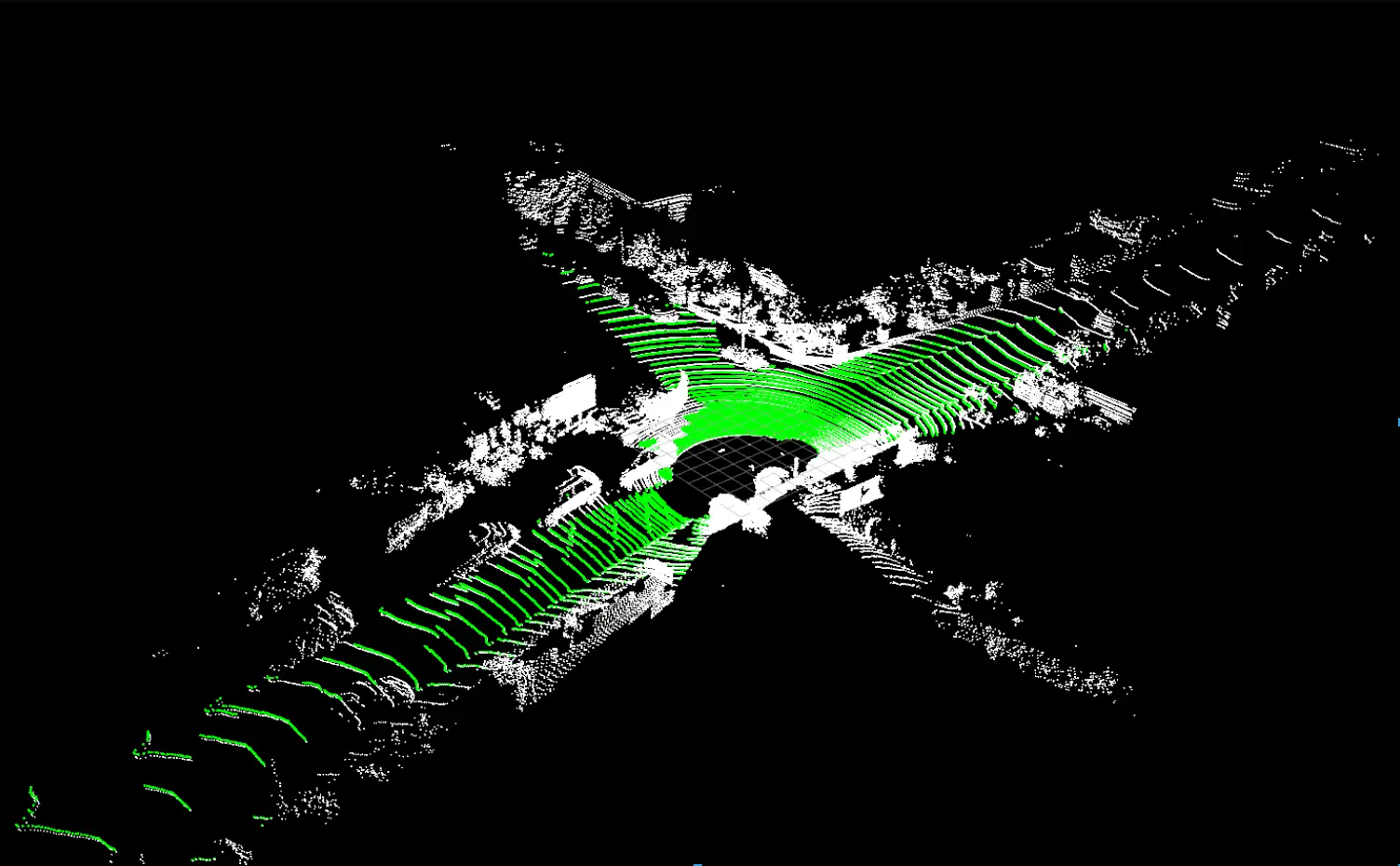
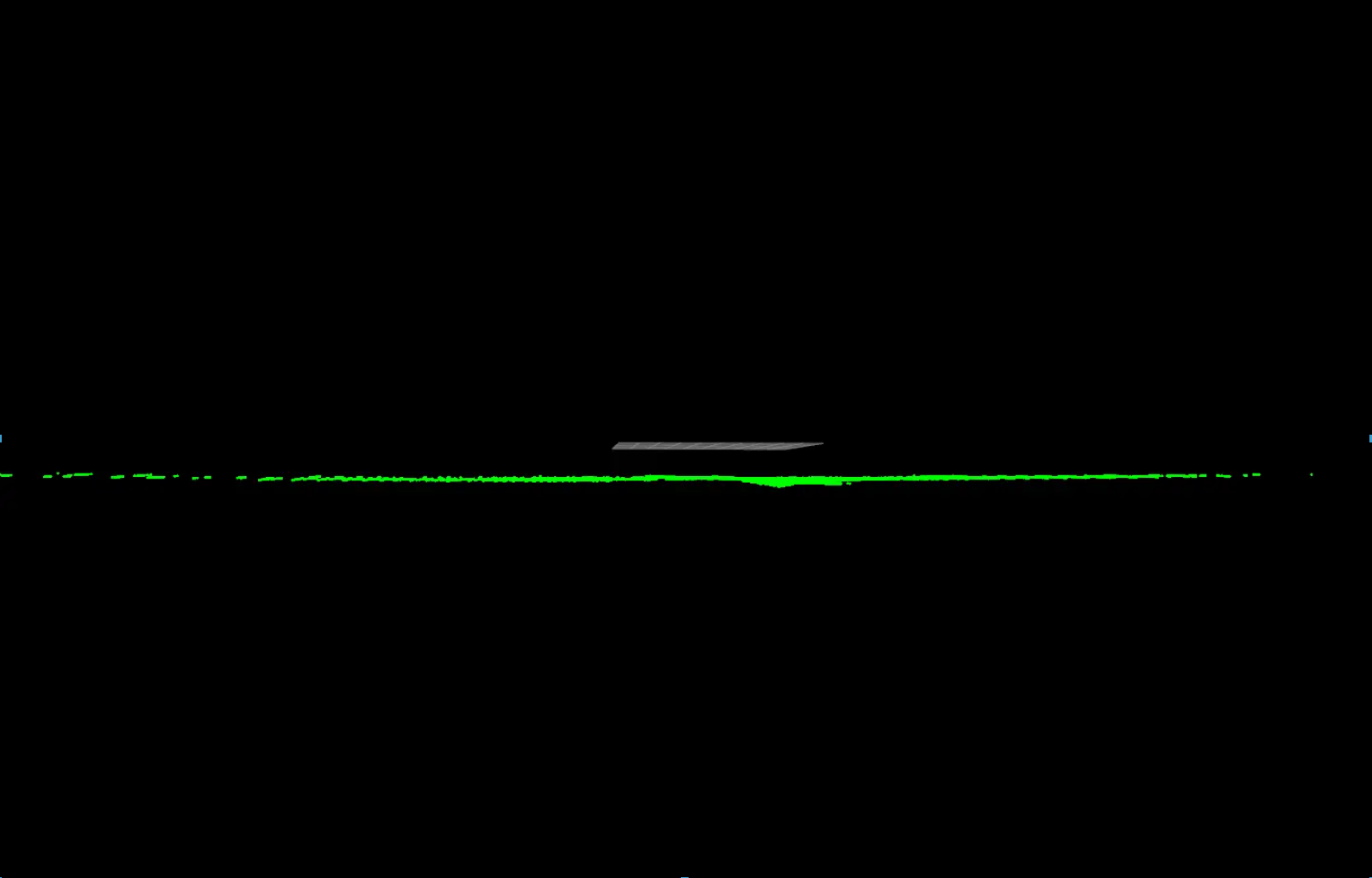
校准点云(白色点为校准前点云,绿色点为校准后点云)
从图左下方可观察到校准后点云与原始点云有一定距离,说明激光雷达在采集数据时,其 z 轴与地面法向量不平行,而且这种情况随时都在发生。自动驾驶车辆行驶过程中,路面随时都有小的颠簸,偶尔还会有较大颠簸,如通过城市道路中的减速带,转弯时速度过大等等情况。所以校准点云是很有必要的。
1.2 栅格高度差方法
方法过程:
根据栅格尺寸生成栅格
计算每个栅格最低点与最高点高度差
比较 h 与预设高度差阈值 threshold 大小,对栅格进行分类
根据栅格分类,对栅格内点进行分类
方法结果
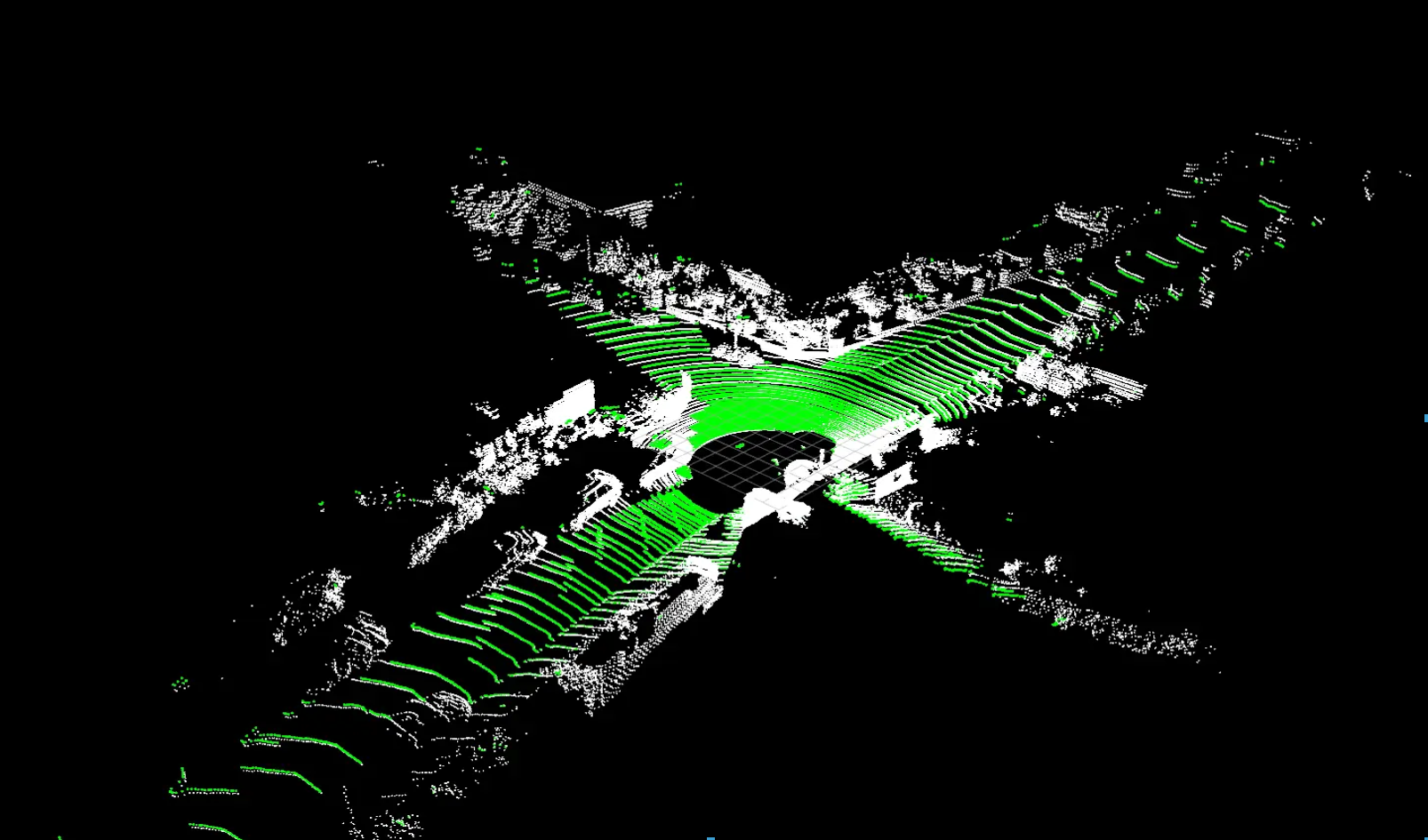
鸟瞰图
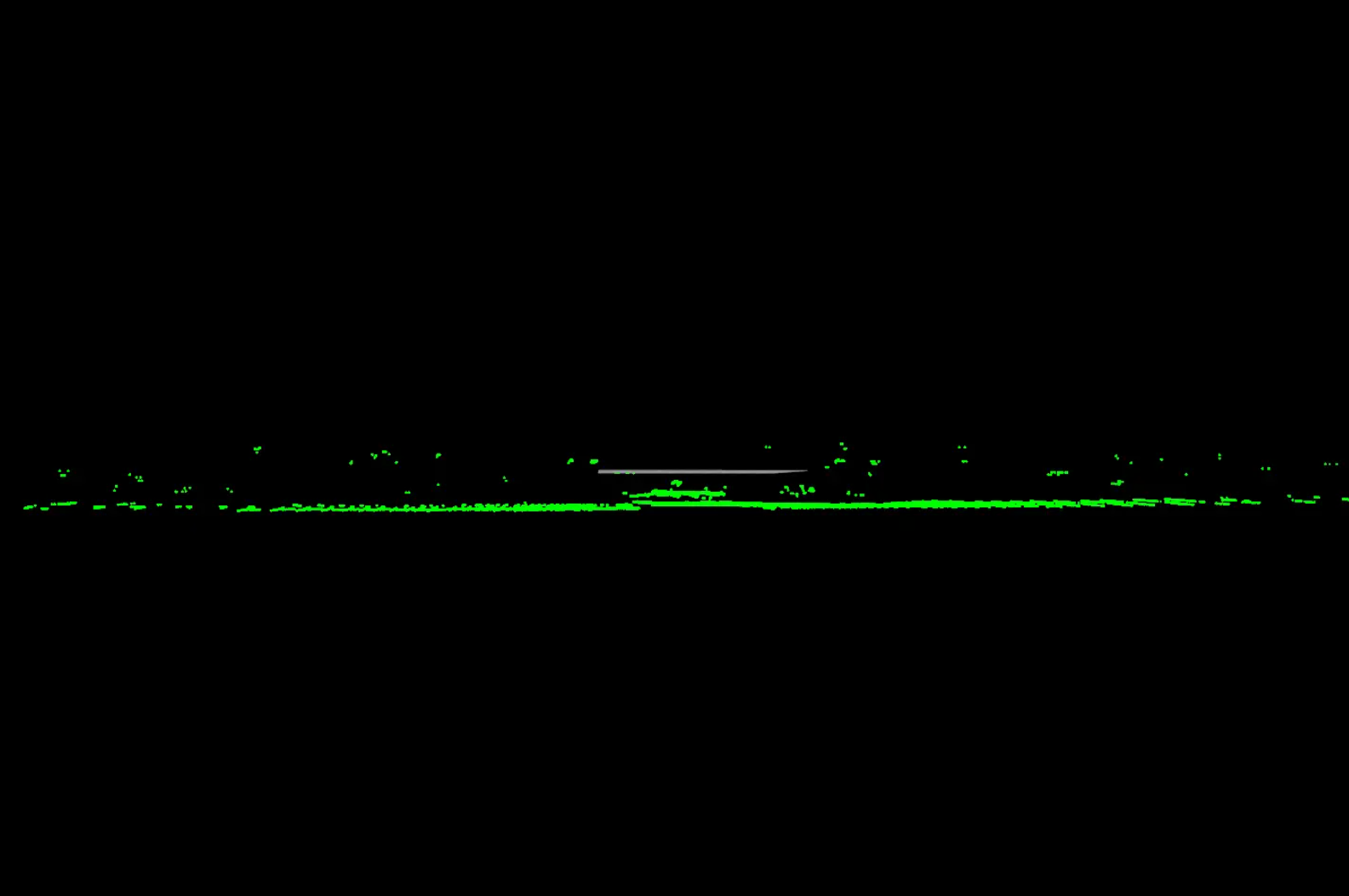
右视图
结果分析
依据对每个栅格的高度差的大小进行分类,栅格高度差方法依赖于点云数据。栅格内地面点高度差特征符合栅格高度差方法,但是对于高平台仍然符合该特征,所以对于进行栅格话之后的高平台点仍然被分类为地面点。但是,该方法的分类出的地面点包含真实的地面点。
1.3 法向量方法
法向量方法基于假设为计算得到的地面点法向量为竖直向上或向下,即地面点法向量值为 (0, 0, 1) 或 (0, 0, -1) 。
方法过程:
计算点法向量
设定法向量阈值 threshold 进行点分类
方法结果
鸟瞰图
右视图
结果分析
根据法向量方法的假设,一定要先对点云进行校正,如果不进行校正,那么很可能出现某一帧没有地面点被分割出来的极端情况(激光雷达倾斜角度过大)。法向量方法与高度差方法结果类似,对于平台类型障碍物生成的点无法有效区分。所以可以看到右视图中有部分店漂浮与真实地面点上方。
1.4 栅格最低高度以上0.2米方法
栅格最低高度以上 0.2 米方法中的数值 0.2 可在 0.2 附近进行选取,有论文设置为 0.15 。此方法与栅格高度差方法类似,也是基于栅格内点的高度信息来进行点分类。不过该方法并没有对栅格进行地面栅格或障碍物栅格分类,而在每个栅格内进行点的分类,最后将所有栅格内的点汇总得到地面点。
方法过程:
生成栅格地图
找到栅格内最低点,并储存其高度 h
找到栅格内点高度小于 h + 0.2,分类为地面点
方法结果
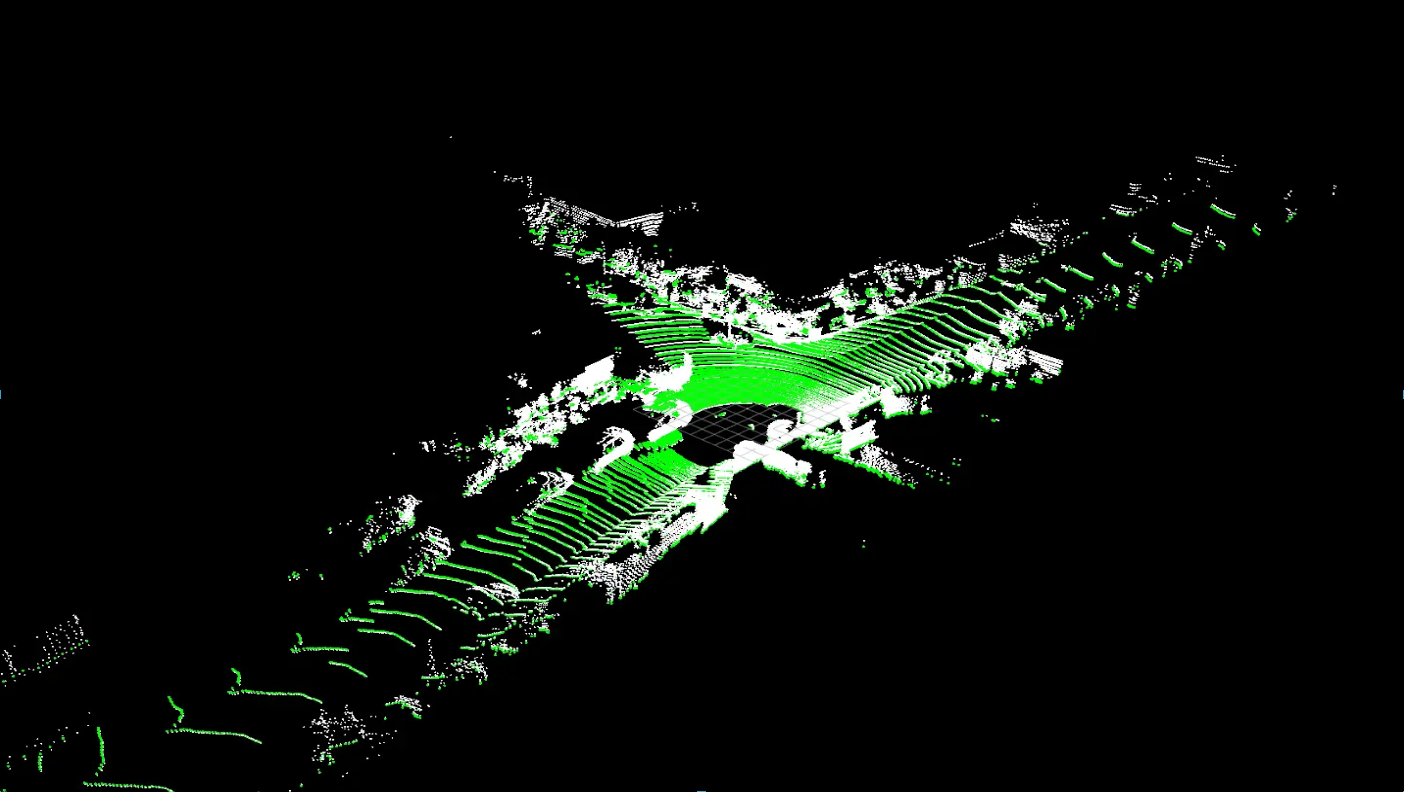
鸟瞰图
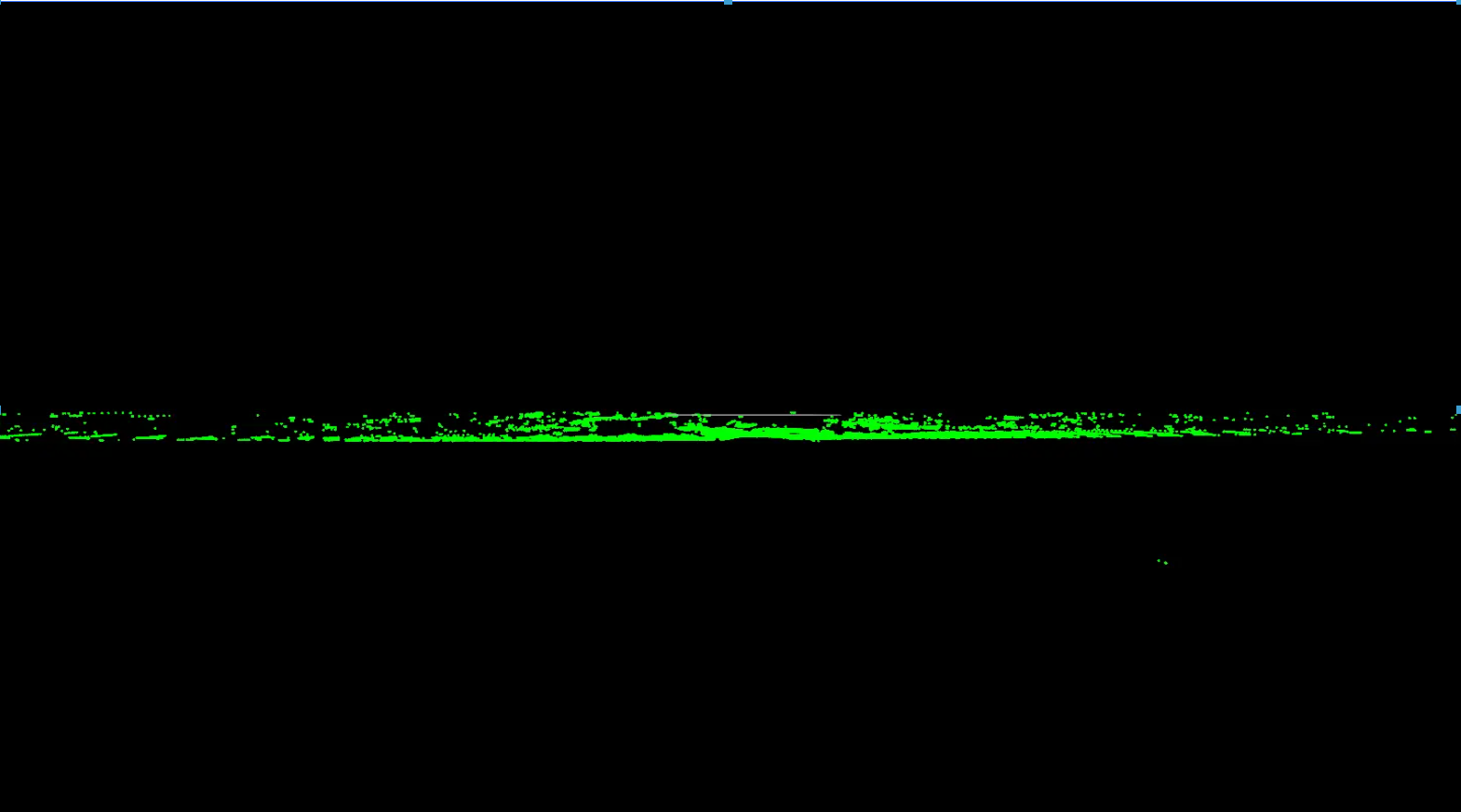
右视图
结果分析
栅格最低高度以上0.2米方法依赖于栅格内的最低点选取,当最地点正好是真实地面点时,结果较为正确,反之则不然。与栅格高度差方法类似,该方法对悬浮物无法处理。
1.5 绝对高度方法
绝对高度方法根据校准后点云高度进行分割,通过设定阈值将点云分为地面点和障碍物点。
方法过程:
校准点云
根据高度阈值 threshold 对点进行分类
方法结果
鸟瞰图
右视图
结果分析
绝对高度方法必须对校准点云进行操作,根据校准后点云通过设定高度阈值进行分类。从鸟瞰图可看出,远处有一部分地面点被分割为障碍物点,从结果右视图可看出,该方法对悬浮物可很好处理。
1.6 平均高度方法
平均高度方法是对预处理后已经包含大部分地面点进行的处理,而不能单独进行使用。本文采用栅格最低点高度以上 0.2 米方法作为预处理,其他地面点预处理也可。该方法基于假设为,预处理分割后得到点中地面点为绝大部分点,从而可根据平均高度作为进一步滤波。
方法过程:
栅格最低点高度以上 0.2 米方法分割出地面点
计算 过程 1. 得到地面点的平均高度 h
以 h 为阈值再进行分割得到地面点
方法结果
鸟瞰图
右视图
结果分析
平均高度方法作为其他方法的一个小的补充,可对分割出的点悬浮物点进行进一步滤波。但对当大平台场景无法处理。
结论
本文对基于几何特征方法 水平面校准方法、法向量方法、栅格高度差方法、栅格最低高度以上0.2米方法、绝对高度方法、平均高度方法 等方法进行了分别分析,对各自方法优缺点进行了探讨。各个方法可以进行合理组合来达到地面点分割效果。这些方法可作为机器学习方法的数据集生成,为机器学习方法做好数据准备。
版权声明:本文内容由网络用户投稿,版权归原作者所有,本站不拥有其著作权,亦不承担相应法律责任。如果您发现本站中有涉嫌抄袭或描述失实的内容,请联系我们jiasou666@gmail.com 处理,核实后本网站将在24小时内删除侵权内容。


发表评论

暂时没有评论,来抢沙发吧~